/webcode.jsp
/de/suche/index.jsp
https://publikationen.dguv.de/DguvWebcode?query=

Schematische Darstellung des Kollisionsprozesses zwischen Oberarm und stoßendem Roboterteil
Bild: IFA
Auf Initiative des damaligen Fachausschusses Maschinenbau, Fertigungssysteme und Stahlbau erarbeitete das IFA in einem Entwicklungsprojekt medizinisch/biomechanische und arbeitsorganisatorische Anforderungen an Arbeitsplätze mit kollaborierenden Robotern. Sie wurden zunächst in einer BG/BGIA-Empfehlung zusammengefasst, bevor sie mit dem Erscheinen der Technischen Spezifikation (TS) 15066 als Ergänzung zur ISO10218-2 präzisiert und normativ verankert wurden. Mit der aktuellen Überarbeitung sollen verifizierte Grenzwerte in den Teil 2 der EN ISO 10218 aufgenommen werden. Ergänzungen zu den normativen Anforderungen finden sich in der nationalen DGUV-Information 080 Kollaborierende Robotersysteme: Planung von Anlagen mit der Funktion "Leistungs- und Kraftbegrenzung".
In einem bestimmungsgemäß durchgeführten kollaborierenden Arbeitsprozess sind Kollisionsrisiken zwischen einem Roboter und Personen nicht auszuschließen. Daher bestand die Aufgabe darin, die biomechanischen Beanspruchungseffekte einer Kollision so zu begrenzen, dass nur geringe, tolerable Beanspruchungsschweren für betroffene Personen auftreten können. Je nach Festlegung des Kollisionsrisikos in der Risikobeurteilung einer konkreten Arbeitsapplikation mit einem kollaborierenden Roboter wird als Beanspruchungsschwere entweder die Schmerzschwelle (Übergang von Druckgefühl in Schmerzgefühl) oder der Verletzungseintritt (Schwellung, geringfügiges Hämatom) herangezogen. Die festgelegte zulässige Schwere der Körperbeanspruchung kann durch Grenzwerte zusammenhängender Beanspruchungskriterien abgebildet werden.
Für alle Bereiche eines einfachen Körpermodells wurden erste orientierende Grenzwerte für die Beanspruchungskriterien "Stoßkraft", "Klemm-/Quetschkraft" und "Druck/Flächenpressung" festgelegt. Das IFA hat dazu Verletzungsdaten aufgrund äußerer mechanischer Belastungen aus Literatur und Datenbanken recherchiert. Im DGUV-Projekt FP 317 "Ermittlung eines Schmerzschwellenkatasters des Menschen" wurden in Kooperation mit der Universitätsmedizin der Johannes Gutenberg-Universität Mainz Kraft- und Druckgrenzwerte ermittelt: für die quasistatische Anwendung und eine kleine kantige Belastungsform mit einem Stößel. Hieraus konnten signifikante Druckgrenzwerte für die aktuellen Dokumente gewonnen werden (siehe Schmerzschwellenkataster).
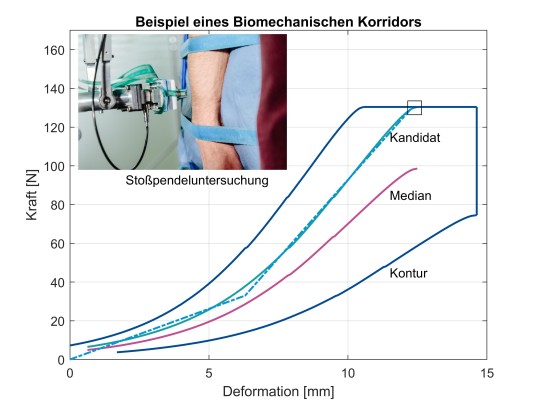
Biomechanischer Korridor ermittelt aus Stoßpendeluntersuchungen am Unterarm.
Bild: IFA/IFF
Zur Minimierung des Verletzungsrisikos von Beschäftigten an kollaborierenden Robotern wurden zwei DGUV-Forschungsprojekte durchgeführt: FP 0411 - "Anschlussuntersuchungen zur BGHM-Studie 'Kollaborierende Roboter: Ermittlung von Schmerzeintrittsschwellen an der Mensch-Maschine-Schnittstelle" und FP 0430 - "Mensch-Roboter-Kollaboration - Partielle Ergänzungsuntersuchungen zur Eignung für Übernahme in das DGUV-Schriftenwerk sowie Normung". In Kooperation mit dem Fraunhofer Institut für Fabrikbetrieb und -automatisierung (IFF) konnten dabei dynamische Kraft- und Druckgrenzwerte sowohl für kantige als auch für flächige Belastungen ermittelt werden. Somit können die zuvor aus der Literaturstudie gewonnen Grenzwerte und die verwendeten abgeschätzten Faktoren mit den empirisch ermittelten Werten authentifiziert werden. Zusätzlich wurden im IFA-Projekt 5160 aus den experimentellen Daten biomechanische Korridore ermittelt, die als Grundlage für eine messtechnische Überprüfung mit einem biofidelen Messgerät (siehe Prüftechnik) dienen.
Die Ergebnisse der Untersuchungen sind den zuständigen Normengremien vorgelegt worden und sollen bei der nächsten Überarbeitung berücksichtigt werden. Eine Aktualisierung der DGUV Information ist in Vorbereitung. Sie wird umfangreiche Hilfen für die Anwendung der sicherheitstechnischen Anforderungen bei der Risikobewertungen in der betrieblichen Praxis enthalten.
Auf der Grundlage der sicherheitstechnischen Anforderungen und der in den Dokumenten enthaltenen medizinisch/biomechanischen Anforderungen können Arbeitsplätze mit kollaborierenden Robotern so eingerichtet und geprüft werden, dass die durch Kollision ggf. auftretenden mechanischen Einwirkungen auf die Personen ein akzeptables bzw. tolerables Maß nicht überschreiten. Damit bleibt der erforderliche Arbeitsschutz für die beteiligten Personen gewährleistet.
Für Risikobeurteilungen und Messungen in der betrieblichen Praxis entwickelte das IFA das biofidele (mechanisch menschenähnliche) Kraft-Druck-Messgerät KDMG-KOLROBOT (siehe Prüftechnik).
 - Medizinisch/Biomechanische Anforderungen")
Ende 2023 ist die neue Norm ISO/PAS 5672 erschienen: Robotics - Collaborative applications - Test methods for measuring forces and pressures in human-robot contacts
 - Medizinisch/Biomechanische Anforderungen")
 - Medizinisch/Biomechanische Anforderungen")
 - Medizinisch/Biomechanische Anforderungen")
Projekt-Nr. FF-FP 0317: "Kollaborierende Roboter - Ermittlung der Schmerzempfindlichkeit an der Mensch-Maschine-Schnittstelle"
Projekt-Nr. FF-FP 0411: Anschlussuntersuchungen zur BGHM-Studie "Kollaborierende Roboter: Ermittlung von Schmerzeintrittsschwellen an der Mensch-Maschine-Schnittstelle"
Projekt-Nr. FF-FP 0430: "Mensch-Roboter-Kollaboration - Partielle Ergänzungsuntersuchungen zur Eignung für Übernahme in das DGUV-Schriftenwerk sowie Normung"
Projekt-Nr. IFA 5160: "Entwicklung und Evaluation eines messtechnischen Konzeptes für kollaborierende Roboter"
Unfallprävention: Digitalisierung - Technologien
Tel: +49 30 13001-3510